What Is Canadarm? Learn About the Robotic Arm That Helped Build the International Space Station
Written by MasterClass
Last updated: Sep 29, 2021 • 3 min read
The International Space Station, the world’s largest structure ever in space, began assembly in orbit in 1998 and has had crews aboard continuously since 2000. There are 15 countries cooperating on a daily basis to operate it. ISS was designed for 30 years of life, through 2028, when the cost of maintenance is expected to start becoming prohibitive. The ISS has benefited enormously from contributions from Canadian scientists and astronauts. One of the most important contributions from Canadian Aerospace engineers is the Shuttle Remote Manipulator System (or SRMS)—known as Canadarm.

Learn From the Best
What Is Canadarm?
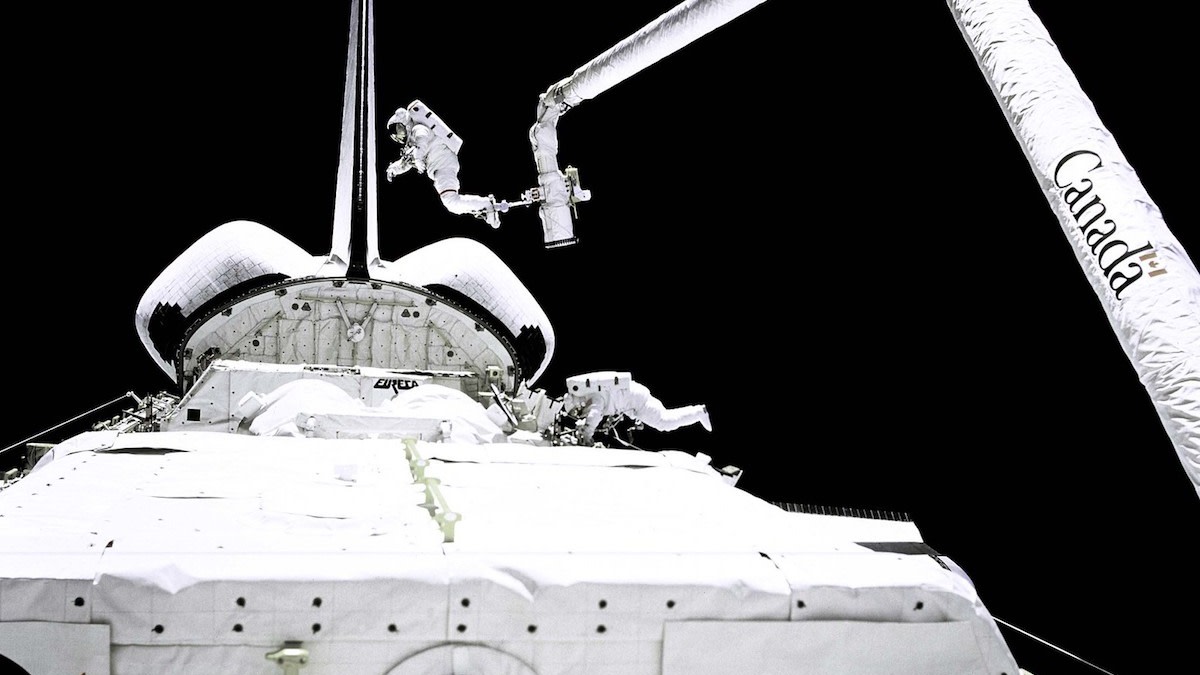
Canadarm is the name given to a series of specially outfitted robotic arms designed by the Canadian Space Agency (CSA) and installed on NASA space shuttle orbiters. The basic Canadarm setup consists of a manipulator robot arm, a display panel with hand controllers and a controller interface unit.
On the ISS, Canadarm (shuttle-based) and Canadarm2 (ISS-based) help assemble, grow, and repair the ISS. The ISS also has a two-armed dexterous robot called Dextre for delicate work outside, and a Japanese-built robotic arm for deploying experiments externally.
What Is the Purpose of Canadarm?
The first Canadarm was initially designed to carry payloads of cargo weighing up to 733 pounds when in space. However, if operated on Earth, the arm is not strong enough to lift even its own weight. It was designed primarily to assist in the assembly of the ISS.
The arm is designed with six joints that correspond to the joints found in a human arm. At the end of the unit is a grapple unit that is meant to connect with fixtures found on the potential payload.
How Was Canadarm Developed?
The CSA started assisting NASA on the space shuttle program in the late 1960s. In 1975, the Canadian National Research Council made a commitment to NASA that Canada would devise the new Shuttle Remote Manipulator System. The Canadian company Spar Aerospace was eventually awarded the contract and began designing the new technology.
Eventually, a second Canadian firm, DSMA ATCON, was brought in to contribute, and they designed the Canadarm end effector. The main control programming was designed by Dynacon, an engineering company based in Toronto. The first SRMS system was sent to NASA in April of 1981.
What Is the Operational History of Canadarm?
The first operational Canadarm was tested on the STS-2 mission onboard the Space Shuttle Columbia. The first operational shuttle mission on which the Canadarm was fully utilized was STS-3, also on Columbia.
Canadarm was frequently used by shuttle missions to the ISS to install new equipment and conduct checks on existing modules of the space station.
The Canadarm’s final mission was in July of 2011 onboard Space Shuttle Atlantis. The Canadarm used on Space Shuttle Endeavour was installed at the Canada Aviation and Space Museum in Ottawa following its final space shuttle mission.
The original Canadarm was followed up by the larger, next-generation Canadarm2 and the Special Purpose Dexterous Manipulator (or Dextre), both designed by Canadian engineers. Both of these robotic systems are part of the Mobile Servicing System or MSS and are part of Canada’s ongoing contribution to space robotics and space exploration.
Whether you’re a budding astronautical engineer or simply want to become more informed about the science of space travel, knowing the rich and detailed history of human space flight is key to understanding how space exploration has advanced. In his MasterClass, Chris Hadfield, the former commander of the International Space Station, provides invaluable insight into what it takes to explore space and what the future holds for humans in the final frontier. Chris also talks about the science of space travel, life as an astronaut, and how flying in space will forever change the way you think about living on Earth.
Want to become better engaged with science and technology? The MasterClass Annual Membership provides exclusive video lessons from master scientists and astronauts, including Chris Hadfield.